4 Nebesna mehanika – Keplerjevi zakoni
Andreja Gomboc
Ob opazovanju položaja teles na nebesni sferi so se astronomi do konca 19. stoletja ukvarjali večinoma z nebesno mehaniko. Glavna naloga nebesne mehanike je bila razložiti in napovedati gibanje planetov in njihovih lun.
Johannes Kepler je leta 1609 v delu Astronomia nova objavil svoja prva dva zakona in leta 1619 v delu Harmonices mundi (Ubranost sveta) še svoj tretji zakon. Keplerjevi zakoni se v originalni obliki, kot jih je zapisal Kepler, glasijo:
- 1. Keplerjev zakon: Planeti se gibljejo okoli Sonca po elipsah s Soncem v enem od gorišč elipse.
- 2. Keplerjev zakon: Daljica, ki povezuje planet s Soncem, opiše v enakem časovnem intervalu enako ploščino.
- 3. Keplerjev zakon: Kvadrat obhodnega časa planeta je sorazmeren s kubom velike polosi njegove tirnice.

Keplerjevi zakoni so opisovali, kako se planeti gibljejo okrog Sonca. A šele nekaj desetletij kasneje, v 80. letih 17. stoletja, je Isaac Newton pojasnil, zakaj se planeti gibljejo tako – da je to gibanje posledica gravitacijske sile, ki deluje v smeri zveznice med telesoma in pada s kvadratom razdalje.
V tem poglavju bomo pokazali, da Keplerjevi zakoni sledijo iz Newtonovih zakonov.
Pri tem bomo obravnavali sistem dveh teles in predpostavili, da nanj ne vplivajo druga telesa. V našem Osončju je sicer kopica različnih teles, vendar to poenostavitev smemo narediti, ker je Sonce veliko masivnejše od vseh drugih teles – ima 1000-krat večjo maso kot drugo najmasivnejše telo Osončja, Jupiter. Gibanje planetov je v veliki meri določeno s Soncem in ga eliptične tirnice dobro opišejo. Če bi želeli določati gibanje planetov zelo natančno, bi morali upoštevati majhne spremembe tirnic (perturbacije), ki jih povzročajo drugi planeti (primer je odkritje Neptuna, ki ga obravnavamo v naslednjem poglavju).
4.1 Težiščni sistem
Opis gibanja dveh teles lahko nadomestimo z opisom gibanja enega telesa okoli mirujoče mase, če zapišemo ustrezne izraze v težiščnem sistemu. S tem problem nekoliko poenostavimo.
Obravnavajmo sistem dveh teles z masama  in
in  . Ti telesi sta lahko dve zvezdi, zvezda in planet, Sonce in komet, planet in njegova luna, Zemlja in umetni satelit idr. Naj do njiju v nekem koordinatnem sistemu kažeta vektorja
. Ti telesi sta lahko dve zvezdi, zvezda in planet, Sonce in komet, planet in njegova luna, Zemlja in umetni satelit idr. Naj do njiju v nekem koordinatnem sistemu kažeta vektorja  in
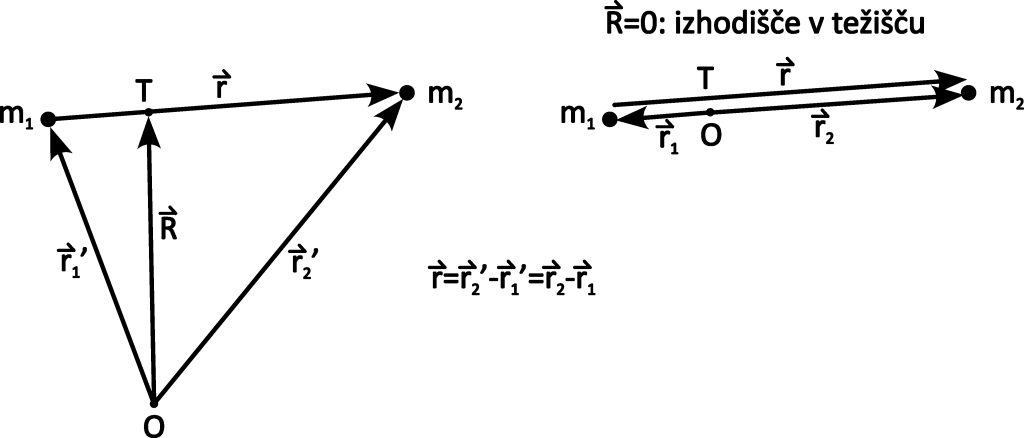
in  (slika 4.2). Vektor
(slika 4.2). Vektor  kaže od prvega do drugega, vektor do njunega težišča pa je:
kaže od prvega do drugega, vektor do njunega težišča pa je:
(1) 
Označimo skupno maso z
(2) 
(3) 
Postavimo se v težiščni koordinatni sistem. To pomeni, da postavimo koordinatno izhodišče v težišče:  . Označimo z
. Označimo z  in
in  vektorja do prvega in drugega telesa v tem sistemu in vektor med telesoma z
vektorja do prvega in drugega telesa v tem sistemu in vektor med telesoma z
(4) 
To nam skupaj z (1) da:
(5) 
Zapišimo v težiščnem sistemu celotno energijo obeh teles:
(6) 
Pri tem sta prva dva člena kinetični energiji posameznih teles in zadnji njuna gravitacijska potencialna energija. Pri tem je  gravitacijska konstanta.
gravitacijska konstanta.
Upoštevajmo, da je hitrost telesa odvod krajevnega vektorja po času in še izraza (5). Dobimo:
(7) 
Pri tem je  relativna hitrost enega telesa glede na drugega.
relativna hitrost enega telesa glede na drugega.
Vstavimo v (6), uredimo in dobimo:
(8) 
Pri tem sta  in
in  dolžini ustreznih vektorjev. Vidimo, da lahko skupno energijo obeh teles opišemo kot energijo telesa z maso
dolžini ustreznih vektorjev. Vidimo, da lahko skupno energijo obeh teles opišemo kot energijo telesa z maso  , ki se s hitrostjo giblje v gravitacijskem polju mase
, ki se s hitrostjo giblje v gravitacijskem polju mase  , ki miruje.
, ki miruje.
Sedaj zapišimo skupno vrtilno količino obeh teles kot vsoto vrtilnih količin posameznih teles:
(9) 
Podobno kot pri energiji vstavimo  in dobimo izraz:
in dobimo izraz:
(10) 
Tudi skupno vrtilno količino lahko zapišemo kot vrtilno količino telesa z maso , ki se s hitrostjo giblje okoli težišča oz. mirujoče mase .
Z opisom v težičnem sistemu lahko nadomestimo opis gibanja dveh teles z masama in z opisom gibanja enega telesa z maso okoli mirujoče mase . S tem bo obravnava nekoliko enostavnejša.
4.2 Drugi Keplerjev zakon
Pokažimo najprej, da je vrtilna količina konstantna. Zapišimo njen odvod po času:
(11) 
Prvi člen je nič, saj je vektorski produkt vektorja samega s sabo enak nič. V drugem členu upoštevamo, da je  gibalna količina, njen odvod po času pa je sila:
gibalna količina, njen odvod po času pa je sila:  . V našem primeru je to gravitacijska sila, ki je središčna sila (deluje namreč v smeri proti središču):
. V našem primeru je to gravitacijska sila, ki je središčna sila (deluje namreč v smeri proti središču):
(12) 
Ker je vzporedna z  , je tudi drugi člen v izrazu (11) enak nič. Časovni odvod vrtilne količine je torej enak nič, kar pomeni, da se vrtilna količina ne spreminja:
, je tudi drugi člen v izrazu (11) enak nič. Časovni odvod vrtilne količine je torej enak nič, kar pomeni, da se vrtilna količina ne spreminja:
(13) 
Konstantnost vrtilne količine pomeni, da je gibanje ravninsko: iz (10) namreč vidimo, da sta in  vedno pravokotna drug na drugega. Če je konstanten in vedno pravokoten nanj, pomeni, da vedno leži v ravnini, ki je pravokotna na .
vedno pravokotna drug na drugega. Če je konstanten in vedno pravokoten nanj, pomeni, da vedno leži v ravnini, ki je pravokotna na .
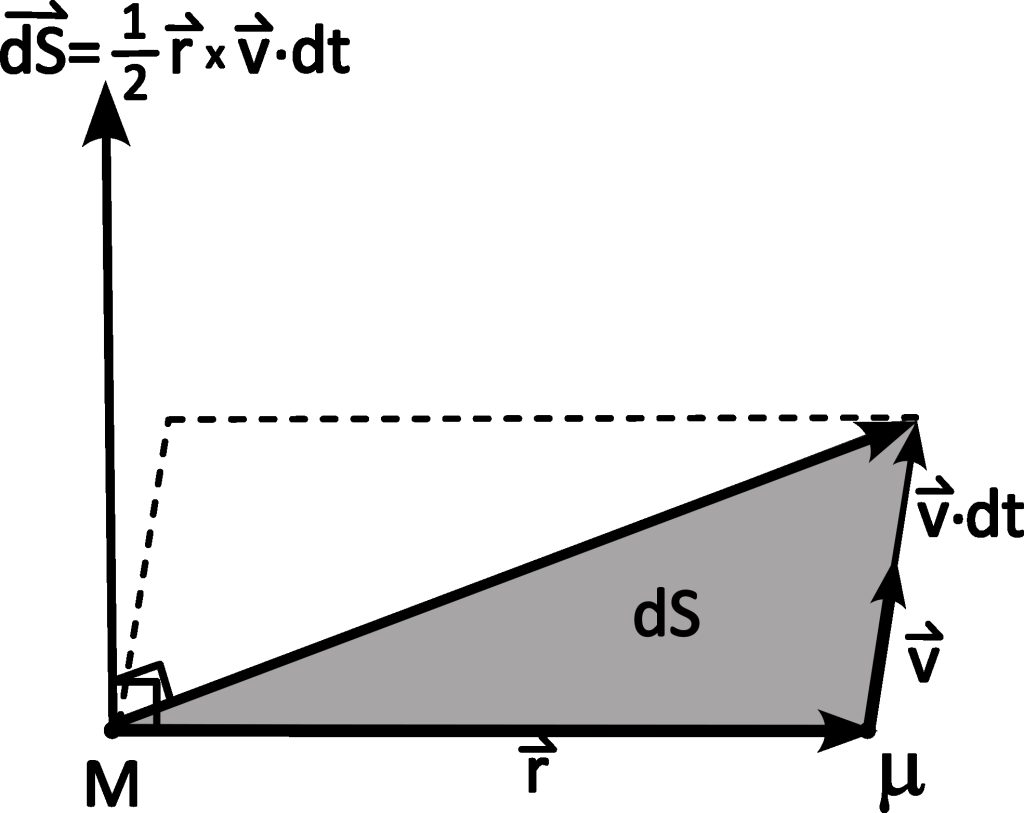 v času
v času  , je enaka polovici dolžine vektorskega produkta
, je enaka polovici dolžine vektorskega produkta  .
.Sedaj poglejmo, kolikšno ploščino opiše v času vektor . Spomnimo se, da je ploščina paralelograma, ki ga opisujeta dva vektorja, enaka velikosti njunega vektorskega produkta. Iz slike 4.3 vidimo, da je ploščina, ki jo v opiše vektor :
(14) 
Iz definicije vrtilne količine (10) sledi, da je  , in zapišemo, da je ploščinska hitrost:
, in zapišemo, da je ploščinska hitrost:
(15) 
Ker je vrtilna količina konstantna, je tudi ploščinska hitrost konstantna. Vektor v enakih časovnih intervalih opiše enake ploščine. Dobili smo 2. Keplerjev zakon.
4.3 Prvi Keplerjev zakon
Za večjo preglednost računov vpeljimo vektor  (vrtilna količina na enoto mase) in s piko označimo odvod po času:
(vrtilna količina na enoto mase) in s piko označimo odvod po času:
(16) 
Vektor je pravokoten na in na  . Je torej pravokoten na ravnino gibanja, vzporeden vrtilni količini in (če se oz. masi teles ne spreminjata) prav tako kot vrtilna količina konstanten:
. Je torej pravokoten na ravnino gibanja, vzporeden vrtilni količini in (če se oz. masi teles ne spreminjata) prav tako kot vrtilna količina konstanten:  (slika 4.4).
(slika 4.4).
 je pravokoten na ravnino tirnice, v kateri ležita vektorja in . Vektor je vzporeden vektorju .
je pravokoten na ravnino tirnice, v kateri ležita vektorja in . Vektor je vzporeden vektorju .Sedaj poglejmo, kako dobimo izraz za drugi odvod krajevnega vektorja, to je  , ki je pospešek reducirane mase .
, ki je pospešek reducirane mase .
Drugi Newtonov zakon za prvo in za drugo telo se glasi:
(17) 
V zgornji enačbi pokrajšamo , v spodnji in odštejemo zgornjo enačbo od spodnje. Dobimo:
(18) 
Zapišimo sedaj izraz za  in upoštevamo, da je
in upoštevamo, da je  :
:
(19) ![\begin{equation*} \vec{k}\times \ddot{\vec{r}}= (\vec{r}\times \dot \vec{r})\times \bigl(- GM {{\vec{r}}\over {r^3}}\bigr) = -{{GM}\over {r^3}} \Biggl[(\vec{r}\cdot \vec{r})\dot{\vec{r}} - (\vec{r}\cdot \dot{\vec{r}})\vec{r} \Biggr] \end{equation*}](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-63fc70c3b87f3b0e8906588e2f5268d9_l3.png "Rendered by QuickLaTeX.com")
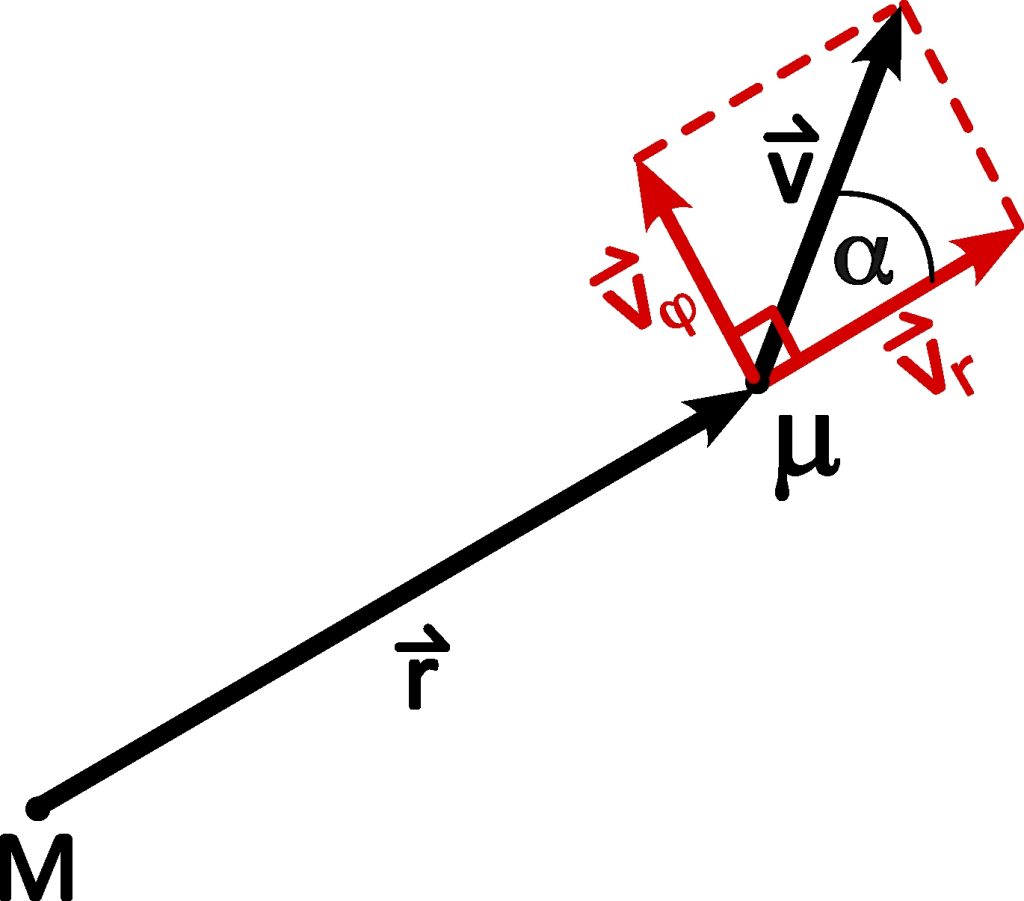
Da bomo razumeli, kaj pomeni produkt  , ki nastopa v zadnjem členu, razstavimo hitrost na komponento v smeri in v smeri naraščanja
, ki nastopa v zadnjem členu, razstavimo hitrost na komponento v smeri in v smeri naraščanja  (slika 4.5):
(slika 4.5):
(20) 
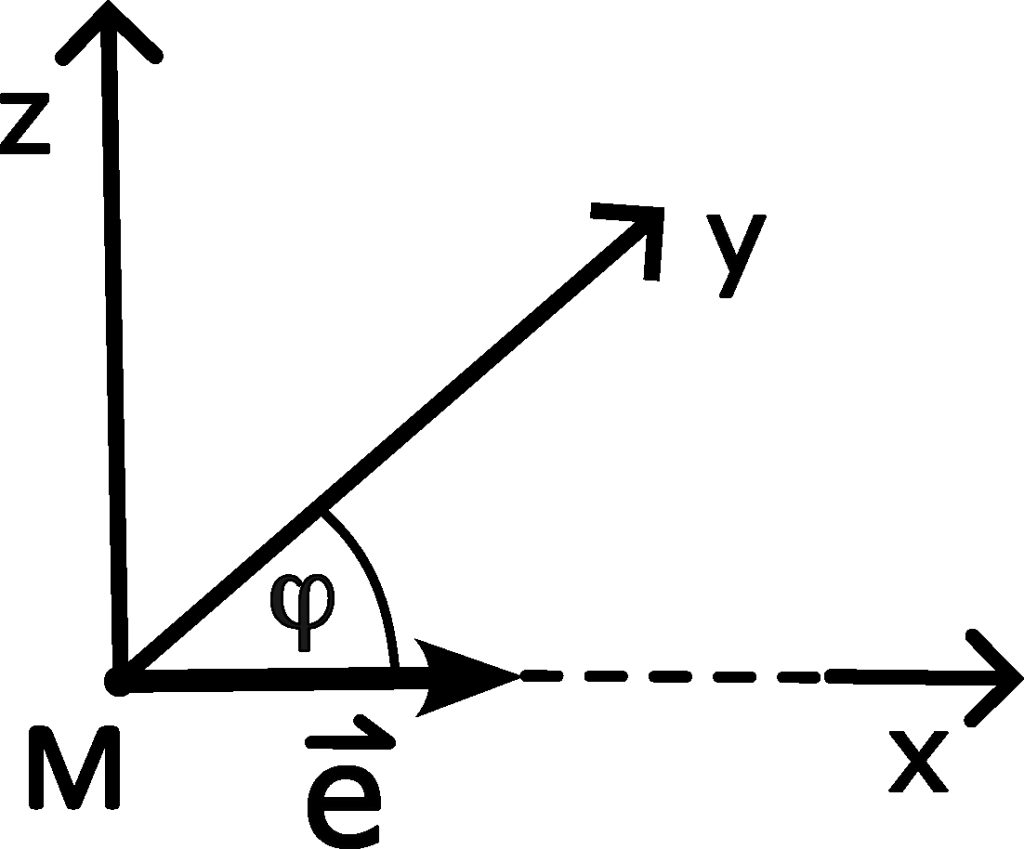
Z  in
in  smo označili enotska vektorja v smeri naraščanja in .
smo označili enotska vektorja v smeri naraščanja in .
Skalarni produkt je enak produktu dolžine vektorja in projekcije hitrosti na , torej  . Upoštevamo to v enačbi (19):
. Upoštevamo to v enačbi (19):
(21) 
V zadnjem koraku ugotovimo, da je to odvod količine v oklepaju po času.
Po drugi strani je izraz tudi odvod po času količine  ( je konstanten):
( je konstanten):
(22) 
Ko izenačimo (21) in (22) ter preuredimo, dobimo:
(23) 
Izraz v oklepaju je torej konstanten vektor, ki mu dajmo oznako  (tako smo izbrali zato, da
(tako smo izbrali zato, da  nima enot):
nima enot):
(24) 
Vektor leži v ravnini gibanja, saj v njej leži drugi člen, ki ima smer , in tudi prvi člen, saj je vektorski produkt pravokoten na . Kasneje bomo videli, da kaže v smeri proti točki na tirnici, v kateri je razdalja med telesoma najmanjša.
 v smeri vektorja
v smeri vektorja Usmerimo os v smeri (štejmo od smeri ) (slika 4.6). Vektor iz enačbe (24) pomnožimo skalarno z :
(25) 
Upoštevamo cikličnost mešanega produkta:  in dobimo:
in dobimo:
(26) 
Velja  (slika 4.6), kar nam skupaj z gornjo enačbo da enačbo tirnice:
(slika 4.6), kar nam skupaj z gornjo enačbo da enačbo tirnice:
(27) 
To je enačba za , ki je po (4) medsebojna razdalja obeh teles. (Da dobimo tirnici posameznih teles okrog težišča, moramo upoštevati (5)).
Mimogrede preverimo prejšnjo trditev, da kaže v smeri, v kateri je razdalja med telesoma najmanjša. Dolžina vektorja  je nenegativna količina, zato iz te enačbe sledi, da je najmanjši, ko je
je nenegativna količina, zato iz te enačbe sledi, da je najmanjši, ko je  . Vektor torej res kaže v smeri točke na tirnici, kjer sta si telesi najbliže.
. Vektor torej res kaže v smeri točke na tirnici, kjer sta si telesi najbliže.
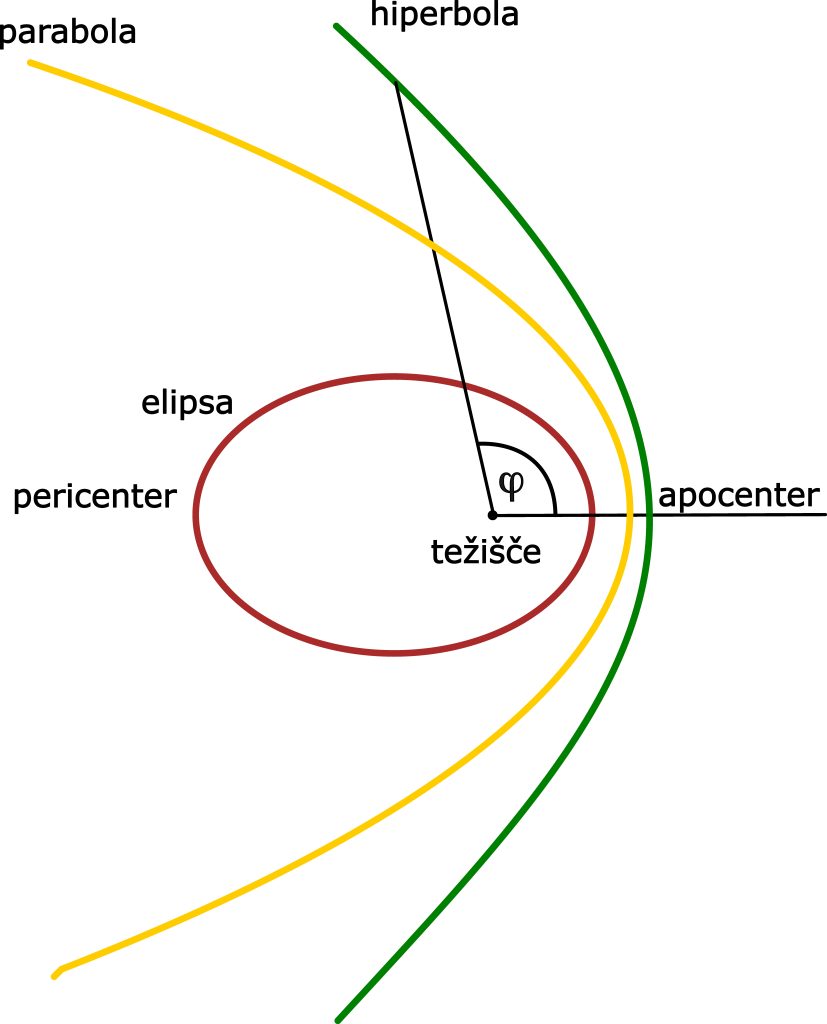
V enačbi tirnice (27) prepoznamo enačbo stožnice, ki je v polarnih koordinatah oblike:
(28) 
Pri tem je  goriščni parameter in izhodišče koordinatnega sistema v enem od gorišč.
goriščni parameter in izhodišče koordinatnega sistema v enem od gorišč.
Poznamo tri vrste stožnic:
 – elipsa:
– elipsa:
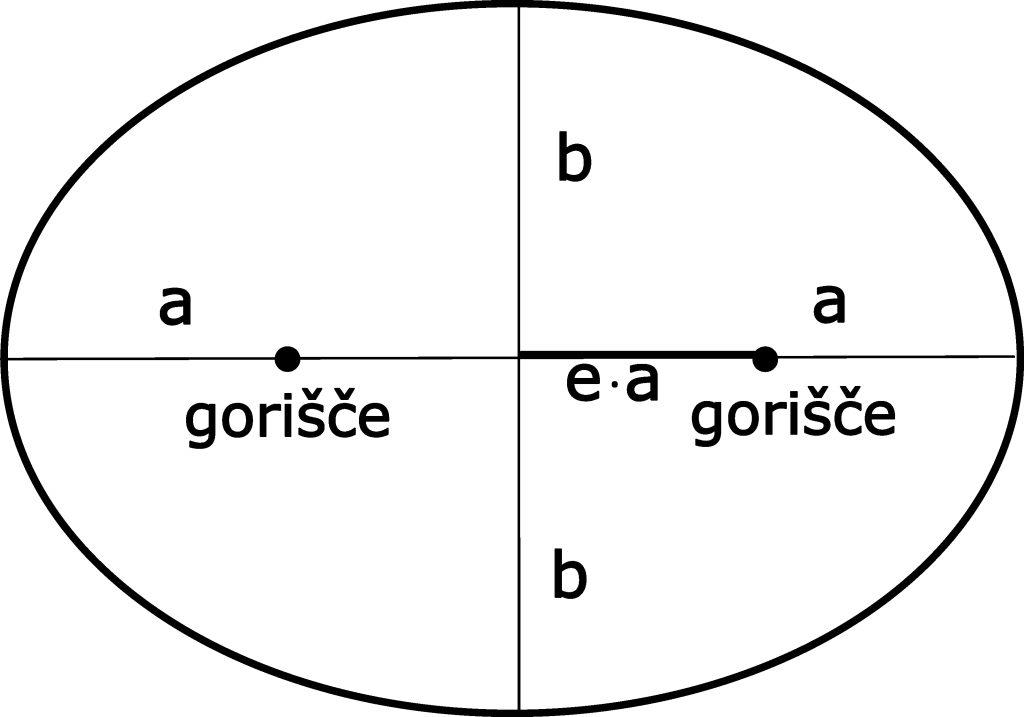
Elipso opišemo z veliko polosjo , malo polosjo
, malo polosjo  in ekscentričnostjo
in ekscentričnostjo  . Za elipso je
. Za elipso je  , in če primerjamo z (27), vidimo, da je:
, in če primerjamo z (27), vidimo, da je:
(29)

(30)

Poseben primer elipse z
 je krožnica:
je krožnica:  .
. – parabola:
– parabola:
Za parabolo je , pri čemer je
, pri čemer je  najmanjša razdalja med točko na paraboli in goriščem parabole (med temenom parabole in enim goriščem). Iz (27) vidimo, da je:
najmanjša razdalja med točko na paraboli in goriščem parabole (med temenom parabole in enim goriščem). Iz (27) vidimo, da je:
(31)

Enačba parabolične tirnice se glasi:
(32)

 – hiperbola:
– hiperbola:
Hiperbolo opišemo z veliko polosjo, malo polosjo in ekscentričnostjo  . Za hiperbolo je
. Za hiperbolo je  , in če primerjamo z (27), vidimo, da je:
, in če primerjamo z (27), vidimo, da je:
(33)

Enačba hiperbolične tirnice je:
(34)

Pokazali smo 1. Keplerjev zakon: tirnica planeta je elipsa, težišče je v gorišču elipse.
Kepler je sicer zapisal nekoliko drugače: da je v gorišču elipse Sonce. To je v približku pravilno, saj je v Osončju masa Sonca  veliko večja od mase planetov, zato je skupna masa
veliko večja od mase planetov, zato je skupna masa  in Sonce (skoraj) miruje v težišču (izhodišču koordinatnega sistema) oz. gorišču elipse.
in Sonce (skoraj) miruje v težišču (izhodišču koordinatnega sistema) oz. gorišču elipse.
Z zgornjo izpeljavo smo pokazali, da poleg elipse obstajata še dve vrsti tirnic: parabola in hiperbola.
4.4.Tretji Keplerjev zakon
3. Keplerjev zakon velja za telesa na eliptičnih tirnicah. Vzemimo 2. Keplerjev zakon (15) in primer eliptične tirnice ter integrirajmo po celem obhodu:
(35) 
Pri tem smo upoštevali, da je  konstanta in smo s
konstanta in smo s  označili obhodni čas ali periodo. Za eliptično tirnico je integral na levi strani enak ploščini elipse:
označili obhodni čas ali periodo. Za eliptično tirnico je integral na levi strani enak ploščini elipse:  , pri čemer je mala polos elipse:
, pri čemer je mala polos elipse:  .
.
Iz (29) izrazimo  in zapišemo:
in zapišemo:
(36) 
Vstavimo v zgornjo enačbo in dobimo (upoštevamo še  ):
):
(37) 
To je 3. Keplerjev zakon.
Kepler ga je zapisal nekoliko drugače:  , pri čemer je izražena v letih in v astronomskih enotah. Ta izraz vključuje privzetek, da je
, pri čemer je izražena v letih in v astronomskih enotah. Ta izraz vključuje privzetek, da je  konst. Za Osončje to približno velja, saj je masa vseh planetov (tudi najmasivnejšega Jupitra) zanemarljiva v primeravi s Sončevo maso:
konst. Za Osončje to približno velja, saj je masa vseh planetov (tudi najmasivnejšega Jupitra) zanemarljiva v primeravi s Sončevo maso:  . Za splošne primere, zlasti na primer za sistem dveh zvezd, pa tega približka ne smemo narediti in uporabimo splošno obliko (37).
. Za splošne primere, zlasti na primer za sistem dveh zvezd, pa tega približka ne smemo narediti in uporabimo splošno obliko (37).
Za primer, ko se manj masivno telo giblje okoli veliko masivnejšega telesa po krožni tirnici, lahko izpeljemo 3. Keplerjev zakon mnogo hitreje na naslednji način. Za telo z maso , ki kroži ( ) okoli zelo masivnega telesa z maso
) okoli zelo masivnega telesa z maso  , sta centripetalna in gravitacijska sila enako veliki:
, sta centripetalna in gravitacijska sila enako veliki:
(38) 
Upoštevamo, da je kotna hitrost  , in sledi:
, in sledi:
(39) 
KAKO SI PREDSTAVLJATI TIRNICI DVEH TELES
Poglejmo primer eliptične tirnice, ki jo opisuje enačba (30). Ta podaja razdaljo med telesoma v odvisnosti od kota :  . Spomnimo se, da opisujemo gibanje v težiščnem sistemu in da smo enačbe zapisali tako, da opisujejo gibanje reducirane mase okoli mase , ki miruje v težišču. Položaja posameznih teles 1 in 2 dobimo iz enačb (5):
. Spomnimo se, da opisujemo gibanje v težiščnem sistemu in da smo enačbe zapisali tako, da opisujejo gibanje reducirane mase okoli mase , ki miruje v težišču. Položaja posameznih teles 1 in 2 dobimo iz enačb (5):
(40) 
Predznak in sorazmernost z nam povesta, da je položaj telesa 1 vedno točno nasproti telesa 2. Težišče miruje, telesi pa se gibljeta okoli njega vsako po svoji elipsi. Težišče je obenem tudi eno od gorišč obeh elips.
Iz enačb vidimo tudi, da sta  , kar pomeni, da sta elipsi, po katerih se gibljeta telesi, manjši od elipse, po kateri se giblje reducirana masa . Masa se giblje po elipsi, ki je manjša za faktor
, kar pomeni, da sta elipsi, po katerih se gibljeta telesi, manjši od elipse, po kateri se giblje reducirana masa . Masa se giblje po elipsi, ki je manjša za faktor  , torej je njena velika polos
, torej je njena velika polos  . Masa se giblje po elipsi, manjši za faktor
. Masa se giblje po elipsi, manjši za faktor  , ki ima veliko polos
, ki ima veliko polos  . Velja, da je:
. Velja, da je:  .
.
Vzemimo, da je  . Iz zgornjih enačb vidimo, da je v tem primeru
. Iz zgornjih enačb vidimo, da je v tem primeru  in
in  , kar pomeni, da se masivnejše telo giblje po manjši elipsi. Predznak pri
, kar pomeni, da se masivnejše telo giblje po manjši elipsi. Predznak pri  pove, da je težišče sistema v “drugem” gorišču te manjše elipse – v primeru na sliki 4.8 je težišče v levem gorišču manjše elipse. Drugo telo (z manjšo maso ) se giblje po večji elipsi, ki ima težišče v “prvem” gorišču (enako kot elipsa reducirane mase) – na sliki 4.8 v desnem gorišču.
pove, da je težišče sistema v “drugem” gorišču te manjše elipse – v primeru na sliki 4.8 je težišče v levem gorišču manjše elipse. Drugo telo (z manjšo maso ) se giblje po večji elipsi, ki ima težišče v “prvem” gorišču (enako kot elipsa reducirane mase) – na sliki 4.8 v desnem gorišču.
V posebnem primeru, ko je , sledi, da je  ,
,  in
in  ,
,  ter
ter  . To pomeni, da se masivnejše telo zelo malo premika oz. skorajda miruje v težišču, drugo telo pa se giblje okrog njega približno po tirnici reducirane mase .
. To pomeni, da se masivnejše telo zelo malo premika oz. skorajda miruje v težišču, drugo telo pa se giblje okrog njega približno po tirnici reducirane mase .
Poseben primer je tudi , ko imamo krožni tirnici – njuni gorišči sovpadata in sta skupno središče obeh krožnic (slika 4.8 desno.)
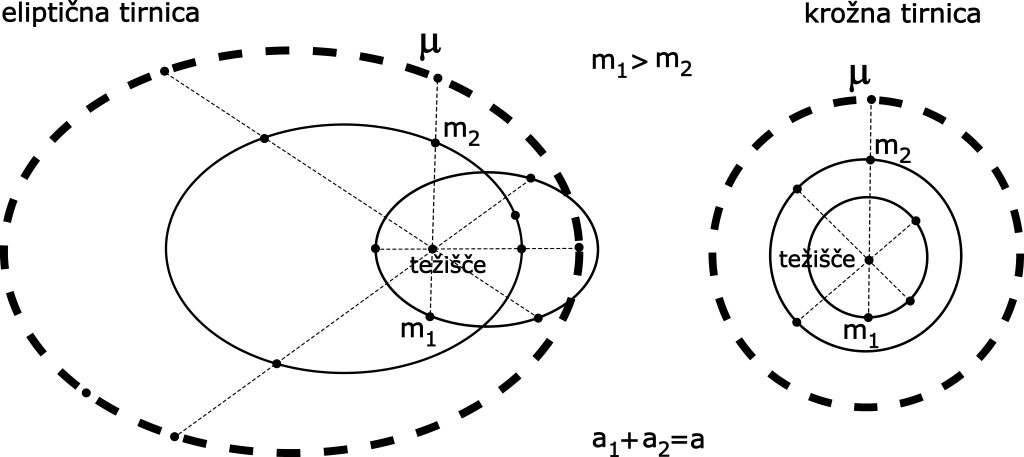 med njima (črtkano) za primer, ko je
med njima (črtkano) za primer, ko je  . Desno: Poseben primer eliptične tirnice je krožna tirnica: masivnejše telo z se giblje po manjši krožnici, manj masivno telo z po večji. Črtkana krožnica označuje tirnico reducirane mase oz. medsebojno razdaljo obeh teles.
. Desno: Poseben primer eliptične tirnice je krožna tirnica: masivnejše telo z se giblje po manjši krožnici, manj masivno telo z po večji. Črtkana krožnica označuje tirnico reducirane mase oz. medsebojno razdaljo obeh teles.4.5 Energija telesa na tirnici
Pokazali smo že, da je vrtilna količina konstantna. Sedaj pokažimo še, da je tudi energija konstantna. Upoštevajmo (18) in razpišimo izraz:
(41) 
Po drugi strani lahko zapišemo:
(42) 
Izenačimo in damo vse na isto stran:
(43) 
Izraz v oklepaju je torej konstanten in v njem prepoznamo energijo  iz (8) na enoto mase :
iz (8) na enoto mase :  . Sledi, da je tudi celotna energija konstantna (se ohranja):
. Sledi, da je tudi celotna energija konstantna (se ohranja):
(44) 
Poglejmo ta izraz in se vprašajmo, katere tirnice se raztezajo v neskončnost? Za te pravimo, da so nevezane tirnice. Telesa na teh tirnicah imajo tudi pri  neko realno hitrost . Ker gre drugi člen v enačbi v neskončnosti proti 0, sledi, da morajo telesa na nevezanih tirnicah imeti
neko realno hitrost . Ker gre drugi člen v enačbi v neskončnosti proti 0, sledi, da morajo telesa na nevezanih tirnicah imeti  . Telesa z
. Telesa z  pa se lahko oddaljijo samo do neke razdalje , pri čemer je
pa se lahko oddaljijo samo do neke razdalje , pri čemer je  , in se nato vrnejo. Ta telesa so na vezanih tirnicah.
, in se nato vrnejo. Ta telesa so na vezanih tirnicah.
Vse tri vrste tirnic imajo točko , v kateri sta telesi najbliže in v njej je najmanjši. Ta točka na tirnici ima posebno ime – pericenter (peri iz grške besede za blizu). Obstajajo tudi sorodni izrazi, ki odražajo nebesni objekt, okoli katerega se neko telo giblje: perihelij ali prisončje, če gre za gibanje okoli Sonca, perigej ali prizemlje, če gre za gibanje okoli Zemlje, perilunij, če gre za gibanje okoli Lune, periastron v primeru gibanja okoli zvezde.
Označimo najmanjšo oddaljenost (oddaljenost v pericentru) z  . Iz enačbe tirnice (27) je:
. Iz enačbe tirnice (27) je:
(45) 
Ker je dosegel minimum, pomeni, da je v tej točki radialna komponenta hitrosti  (ker je
(ker je  ) in je
) in je  . V tem primeru je vektorski produkt
. V tem primeru je vektorski produkt  in vrtilna količina oz. v pericentru:
in vrtilna količina oz. v pericentru:
(46) 
Vstavimo in  v izraz za celotno energijo (44) in za celotno energijo v tej točki dobimo:
v izraz za celotno energijo (44) in za celotno energijo v tej točki dobimo:
(47) 
Poglejmo, kaj nam ta izraz pove za vezane () in nevezane () tirnice (pri čemer vemo, da je na desni strani (47) količina pred oklepajem pozitivna):
 – vezane orbite so elipse
– vezane orbite so elipse – mejno nevezane orbite so parabole
– mejno nevezane orbite so parabole – nevezane orbite so hiperbole
– nevezane orbite so hiperbole
Poglejmo še zvezo med in veliko polosjo . V zgornji izraz (47) vstavimo za elipse (29) in dobimo:
(48) 
Za hiperbole vstavimo (33) in dobimo:
(49) 
Energija telesa na eliptični in na hiperbolični tirnici je odvisna samo od velike polosi in ni odvisna od ekscentričnosti .
KOZMIČNE HITROSTI
Naj bo telo z maso  na razdalji
na razdalji  od večje mase . Če je
od večje mase . Če je  , lahko sistem obravnavamo, kot da miruje v težišču (koordinatnem izhodišču) sistema, pa se giblje.
, lahko sistem obravnavamo, kot da miruje v težišču (koordinatnem izhodišču) sistema, pa se giblje.
Ubežna hitrost je najmanjša hitrost, ki je potrebna, da telo z pobegne privlačni gravitacijski sili mase v neskončnost. Celotna energija telesa se ohranja in velja po (44):
(50) 
V mejnem primeru, ko telo komaj pobegne, ima v neskončnosti hitrost nič. Prav tako gre v neskončnosti proti nič drugi člen, ki je gravitacijska potencialna energija. Celotna energija telesa je torej enaka nič:  ; telo se giblje po parabolični tirnici (navpični met je primer parabolične tirnice z
; telo se giblje po parabolični tirnici (navpični met je primer parabolične tirnice z  ).
).
Zapišimo še celotno energijo telesa v začetni točki , ko ima hitrost  , in v zadnjem koraku upoštevajmo, da je celotna energija enaka nič:
, in v zadnjem koraku upoštevajmo, da je celotna energija enaka nič:
(51) 
Sledi, da je ubežna hitrost z razdalje enaka:
(52) 
Prva kozmična hitrost je hitrost telesa, ki kroži okoli Zemlje tik nad njenim površjem (morebitne ovire, gore ipd. in zračni upor zanemarimo). Za telo z maso , ki se giblje s hitrostjo po krožni tirnici s polmerom okoli Zemlje (masa  ), napišemo podobno kot v (38), da sta centripetalna in gravitacijska sila enako veliki:
), napišemo podobno kot v (38), da sta centripetalna in gravitacijska sila enako veliki:
(53) 
Sledi, da je prva kozmična hitrost:
(54) 
Pri tem smo v zadnjem koraku vstavili  in
in  .
.
Na enak način lahko izračunamo tudi hitrost, s katero se giblje Zemlja po (približno) krožni tirnici s polmerom 1 a. e. ( ) okoli Sonca z maso
) okoli Sonca z maso  :
:
(55) 
Druga kozmična hitrost je ubežna hitrost s površja Zemlje (tudi tu zanemarimo zračni upor in vrtenje Zemlje). Iz (52) sledi, da je druga kozmična hitrost enaka:
(56) 
V splošnem velja, da je ubežna hitrost za faktor  večja od hitrosti, s katero bi telo na isti razdalji krožilo.
večja od hitrosti, s katero bi telo na isti razdalji krožilo.
Tretja kozmična hitrost je ubežna hitrost iz Osončja z Zemljine razdalje od Sonca (1 a. e.). Daleč največjo maso v Osončju ima Sonce, zato lahko vpliv planetov in lun zanemarimo. Iz (52) sledi, da je tretja kozmična hitrost:
(57) 
Četrta kozmična hitrost je ubežna hitrost iz naše Galaksije, če je telo prvotno na razdalji Sonca od središča Galaksije. Le-to je bolj zapleteno izračunati, saj je odvisna od porazdelitve mase v Galaksiji. Za oceno vzemimo, da je ubežna hitrost za faktor večja od hitrosti, s katero Sonce kroži okoli središča Galaksije in znaša  (glej poglavje 7.2):
(glej poglavje 7.2):
(58) 
Pri tem smo privzeli, da je vsa masa Galaksije zbrana bliže središču Galaksije, kot je Zemlja. To seveda ni res (glej 7.2.), zato je zgornji izraz le groba ocena. Meritve kažejo, da je ubežna hitrost iz Galaksije s Sončeve oddaljenosti od njenega središča okrog  .
.
Geostacionarna tirnica je tirnica, na kateri telo kroži v ekvatorialni ravnini okoli Zemlje s periodo, ki je enaka periodi vrtenja Zemlje:  (siderska perioda ali zvezdni dan). Telo (npr. satelit) na taki tirnici ostaja vedno nad istim delom Zemljinega ekvatorja in je za mirujoče opazovalce na Zemlji videti vedno v isti smeri neba. V enačbo za sili na krožni tirnici (53) vstavimo
(siderska perioda ali zvezdni dan). Telo (npr. satelit) na taki tirnici ostaja vedno nad istim delom Zemljinega ekvatorja in je za mirujoče opazovalce na Zemlji videti vedno v isti smeri neba. V enačbo za sili na krožni tirnici (53) vstavimo  , pri čemer je kotna hitrost telesa
, pri čemer je kotna hitrost telesa  . Sledi, da je polmer take tirnice:
. Sledi, da je polmer take tirnice:
(59) ![\begin{equation*} r_{\rm gs}=\sqrt[3]{{GM_\Earth}\over {\omega^2}} = \sqrt[3]{{GM_\Earth {T^*_\Earth}^2}\over {4\pi^2}} = 42.200 \, {\rm km} \end{equation*}](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-3edf1d48c54c3b256b139d3b9390b11e_l3.png "Rendered by QuickLaTeX.com")
Višina telesa nad Zemljinim površjem je  km. Obodna ali krožilna hitrost telesa na geostacionarni tirnici je
km. Obodna ali krožilna hitrost telesa na geostacionarni tirnici je  .
.
4.6 Hitrost telesa na tirnici
4.6.1 Eliptična tirnica
Poglejmo nekoliko podrobneje gibanje po eliptični tirnici. Oddaljenost telesa (reducirane mase) od težišča se spreminja. Najmanjša je, ko je – to je v pericentru. Oddaljenost je največja, ko je  . Tej točki, v kateri sta telesi najdlje, rečemo v splošnem apocenter (apo iz grške besede za vstran) in bolj specifično afelij (odsončje), apogej (odzemlje), apolunij, apastron, odvisno od tega, okoli katerega telesa se giblje.
. Tej točki, v kateri sta telesi najdlje, rečemo v splošnem apocenter (apo iz grške besede za vstran) in bolj specifično afelij (odsončje), apogej (odzemlje), apolunij, apastron, odvisno od tega, okoli katerega telesa se giblje.
Če poznamo in , znamo po enačbi za eliptično tirnico (30) izračunati položaj telesa – za vsak ustrezen ali obratno.
Kolikšna pa je hitrost telesa v neki točki na tirnici? Za poljubno točko eliptične tirnice zapišemo energijo z (44) in (48):
(60) 
Od tod izrazimo hitrost telesa v poljubni točki tirnice:
(61) 
Pri tem smo v zadnjem koraku vstavili enačbo tirnice (30). Z dobljeno enačbo, do katere smo prišli z upoštevanjem ohranitve vrtilne količine in energije, lahko izračunamo velikost hitrosti v poljubni točki na tirnici: če poznamo , uporabimo prvo obliko, če poznamo , pa drugo. Prva oblika kaže, da je hitrost na tirnicah z enako polosjo odvisna samo od (in ne posebej od ali ).
Če nas poleg velikosti hitrosti zanima tudi njena smer, hitrost razstavimo na komponento v smeri in v smeri naraščanja (slika 4.5):
(62) 
Z in smo označili enotska vektorja v smeri naraščanja in in upoštevali, da je  .
.
Uporabimo enačbo eliptične tirnice (30) in odvajamo po  :
:
(63) 
Spomnimo se, da je:
(64) 
Upoštevali smo, da je  , in v zadnjem koraku, da je
, in v zadnjem koraku, da je  .
.
Tako lahko pišemo  , upoštevamo iz (29), da je
, upoštevamo iz (29), da je  , in vstavimo iz (30). Po nekaj računanja dobimo:
, in vstavimo iz (30). Po nekaj računanja dobimo:
(65) 
Za drugo komponento zapišemo:
(66) 
Vstavimo in iz (30) in dobimo:
(67) 
Sedaj poznamo obe komponenti hitrosti. Če nas zanima smer hitrosti glede na , jo dobimo po:  . Celotno hitrost dobimo po Pitagorovem izreku:
. Celotno hitrost dobimo po Pitagorovem izreku:  . Hitro lahko preverimo, da tudi na ta način dobimo izraz (61).
. Hitro lahko preverimo, da tudi na ta način dobimo izraz (61).
Eliptična tirnica ima dve posebni točki: pericenter in apocenter, ki sta po enačbi tirnice (30) pri  in
in  :
:
(68) 
Včasih poznamo samo in  . Kako v tem primeru na čim krajši način izračunati hitrosti v teh dveh točkah?
. Kako v tem primeru na čim krajši način izračunati hitrosti v teh dveh točkah?
Iz (68) dobimo in :
(69) 
Hitrosti v pericentru in apocentru, in  , dobimo z vrtilno količino: v pericentru in apocentru sta in pravokotna med seboj in lahko napišemo velikost vrtilne količine kar z dolžinami vektorjev:
, dobimo z vrtilno količino: v pericentru in apocentru sta in pravokotna med seboj in lahko napišemo velikost vrtilne količine kar z dolžinami vektorjev:
(70) 
Iz ohranitve vrtilne količine sledi, da je hitrost največja takrat, ko je najmanjši – v pericentru –, in da je hitrost najmanjša takrat, ko je največi – v apocentru.
Sledi:
(71) 
Celotno energijo zapišemo v pericentru in apocentru :
(72) 
Izrazimo iz enačbe (71) z , upoštevamo (68) in vstavimo v izraz za celotno energijo. Po nekaj računanja dobimo:
(73) 
Preverimo lahko, da dobimo ta izraza tudi iz (61), če vstavimo in .
4.6.2 Parabolična tirnica
Celotna energija telesa, ki se giblje po parabolični tirnici, je:
(74) 
Iz tega sledi, da je hitrost v poljubni točki tirnice:
(75) 
Posebna točka parabolične tirnice je pericenter, v katerem je:
(76) 
4.6.3 Hiperbolična tirnica
Zapišimo celotno energijo za telo na hiperbolični tirnici, pri čemer upoštevamo (49):
(77) 
Iz te izrazimo hitrost v poljubni točki tirnice:
(78) 
Hiperbolična tirnica ima eno posebno točko – pericenter. V njej je:
(79) 
| Vrsta tirnice | |
|
 |
enačba tirnice | |
| elipsa |  |

|

|
 & & |

|
| parabola |  |
|

|
 |
 |
| hiperbola |  |

|

|
 |
 |







