7 Vektorji v prostoru
Poglavje obravnava geometrijske vektorje v prostoru  .
.
- Definicija in osnove operacije
Definicija 7.1: Geometrijski vektor v je usmerjena daljica, ki je natanko določena s svojo začetno in končno točko  in
in  . Označimo ga z
. Označimo ga z  Dolžina vektorja ali absolutna vrednost ali norma vektorja (oznaka
Dolžina vektorja ali absolutna vrednost ali norma vektorja (oznaka  ) je enaka razdalji med točkama in .
) je enaka razdalji med točkama in .
Dva vektorja sta enaka, če imata isto dolžino in isto smer.
1) Seštevanje vektorjev
Naj bosta  in
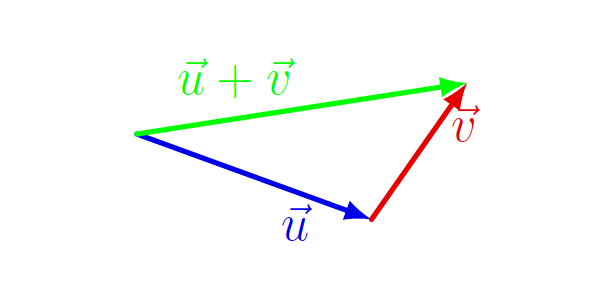
in  poljubna vektorja. Vektorja in lahko premaknemo tako, da konec vektorja sovpada z začetkom vektorja . Potem je vektor
poljubna vektorja. Vektorja in lahko premaknemo tako, da konec vektorja sovpada z začetkom vektorja . Potem je vektor  usmerjena daljica od začetka vektorja do konca vektorja . Ta metoda seštevanja je prikazana na sliki 7.1.
usmerjena daljica od začetka vektorja do konca vektorja . Ta metoda seštevanja je prikazana na sliki 7.1.
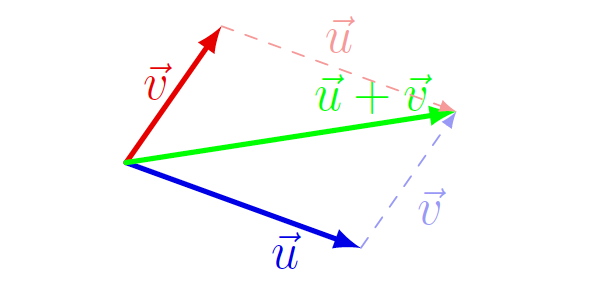
Če imata vektorja in skupno začetno točko, je njuna vsota  velika diagonala paralelograma, ki ima vektorja in za stranici (glej sliko 7.2).
velika diagonala paralelograma, ki ima vektorja in za stranici (glej sliko 7.2).
Vektor, ki se začne in konča v isti točki, imenujemo ničelni vektor  . Velja:
. Velja:
 ;
; ;
; ;
; , kjer je
, kjer je  nasprotni vektor vektorja . To pomeni: če je
nasprotni vektor vektorja . To pomeni: če je  , potem je
, potem je  .
.
Vsak vektor lahko postavimo v prostoru tako, da je njegova začetna točka v izhodišču  koordinatnega sistema. Tedaj je vektor enolično določen s svojo končno točko
koordinatnega sistema. Tedaj je vektor enolično določen s svojo končno točko  in vektor
in vektor  se imenuje krajevni vektor točke
se imenuje krajevni vektor točke  . Vektor potem predstavimo kot urejeno trojico realnih števil, zapisano v obliki stolpca
. Vektor potem predstavimo kot urejeno trojico realnih števil, zapisano v obliki stolpca  ali v obliki vrstice
ali v obliki vrstice  . V nadaljevanju bomo uporabili samo drugi zapis.
. V nadaljevanju bomo uporabili samo drugi zapis.
Lahko pišemo torej in  se imenujejo komponente vektorja
se imenujejo komponente vektorja  .
.
Če obstajata poljubna vektorja  in
in  , potem velja:
, potem velja:
 ;
;- nasprotni vektor je
 ;
;  .
.
Primer 7.1: Naj bosta vektorja  in
in  .
.
Dobimo  ,
,  ter
ter  .
.
2) Množenje vektorja s skalarjem
Naj bo  poljubno realno število. Vektor
poljubno realno število. Vektor  ima dolžino
ima dolžino  in leži na isti premici, na kateri leži vektor . Če je
in leži na isti premici, na kateri leži vektor . Če je  , ima vektor enako smer kot . Če je
, ima vektor enako smer kot . Če je  , potem ima vektor enako smer kot , in če je
, potem ima vektor enako smer kot , in če je  , je ničelni vektor.
, je ničelni vektor.
Lastnosti:
 ;
; ;
; .
.
Za dani poljubni točki  in
in  zapišemo vektor
zapišemo vektor  po komponentah kot
po komponentah kot  .
.
2. Linearna kombinacija, neodvisnost in baza
Vsak vektor v se zapiše kot izraz
![\[\vec{a}=(a_1, a_2, a_3)=a_1(1,0,0)+a_2(0,1,0)+a_3(0,0,1),\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-0226e6e188c4ee2992caf44905985e9a_l3.png "Rendered by QuickLaTeX.com")
kjer so  enotski vektorji (saj je
enotski vektorji (saj je  ). Zato rečemo, da se vsak vektor
). Zato rečemo, da se vsak vektor  zapiše kot linearna kombinacija vektorjev
zapiše kot linearna kombinacija vektorjev  oziroma
oziroma
![\[\vec{a}=a_1\bar{i}+a_2\bar{j}+a_3\bar{k}.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-30ab0ae2c8c367c82a05b0e13bf7f31c_l3.png "Rendered by QuickLaTeX.com")
Množica vektorjev  se imenuje standardna baza vektorskega prostora .
se imenuje standardna baza vektorskega prostora .
Definicija 7.2: Izraz  imenujemo linearna kombinacija vektorjev
imenujemo linearna kombinacija vektorjev  . Skalarji
. Skalarji  se imenujejo koeficienti linearne kombinacije.
se imenujejo koeficienti linearne kombinacije.
Linearna kombinacija je trivialna, če je  . Če je vsaj en
. Če je vsaj en  , je linearna kombinacija vektorjev netrivialna.
, je linearna kombinacija vektorjev netrivialna.
Definicija 7.3: Vektorji so linearno neodvisni, če velja:
![\[\alpha_1\vec{u_1}+\alpha_2\vec{u_2}+\ldots+\alpha_n\vec{u_n}=0\Longrightarrow \alpha_1 = \alpha_2 = \ldots = \alpha_n = 0.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-6874fcfd4aa272bee518234a66a314cb_l3.png "Rendered by QuickLaTeX.com")
Sicer pa so linearno odvisni.
Opomba 7.1:
Vektorji so linearno odvisni, če je eden od njih linearna kombinacija drugih. Prav zares, obstajajo skalarji  (niso vsi enaki nič, torej lahko domnevamo, da je
(niso vsi enaki nič, torej lahko domnevamo, da je  ) tako, da je
) tako, da je  . Sledi, da je
. Sledi, da je
![\[\vec{u_1}=-\frac{\alpha_2}{\alpha_1}\vec{u_2}-\frac{\alpha_3}{\alpha_1}\vec{u_3}-\ldots-\frac{\alpha_n}{\alpha_1}\vec{u_n}=\beta_2\vec{u_2}+\beta_3\vec{u_3}+\ldots+\beta_n\vec{u_n}.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-825e200bdd14734fd469f4a2b739378c_l3.png "Rendered by QuickLaTeX.com")
Opomba 7.2:
Dva vektorja in sta linearno odvisna, če je  z
z  . V tem primeru in ležita na isti premici in pravimo, da sta kolinearna.
. V tem primeru in ležita na isti premici in pravimo, da sta kolinearna.
Trije vektorji  in
in  so linearno odvisni, če obstajata
so linearno odvisni, če obstajata  tako, da je
tako, da je  . V tem primeru trije vektorji ležijo na isti ravnini in so komplanarni.
. V tem primeru trije vektorji ležijo na isti ravnini in so komplanarni.
Primer 7.2: Naj bosta dana vektorja  in
in  . Ker je
. Ker je  , sta dana vektorja linearno odvisna in tudi kolinearna.
, sta dana vektorja linearno odvisna in tudi kolinearna.
Primer 7.3: Zapišimo vektor  kot linearno kombinacijo vektorjev
kot linearno kombinacijo vektorjev  ,
,  in
in  .
.
Vektor  se izraža kot linearna kombinacija vektorjev
se izraža kot linearna kombinacija vektorjev  ter
ter  , če obstajajo skalarni
, če obstajajo skalarni  tako, da je
tako, da je  .
.
To je ekvivalentno z

Dobimo sistem
![\[\begin{cases} \alpha+3\beta+\gamma=8\\ -2\alpha+2\beta=6\\ \alpha+\beta-\gamma=4\end{cases},\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-4f66060947fe8b10f61be9ce202087c1_l3.png "Rendered by QuickLaTeX.com")
ki ga rešujemo po Gaussovi eliminacijski metodi. Razširjeno matriko sistema preoblikujemo v vrstično kanonično obliko

Pripadajoči sistem je
![\[\begin{cases} \alpha+3\beta+\gamma=8\\ 8\beta+2\gamma=14\\ 3\gamma=1\end{cases},\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-0f1d3977d14af88df1b1d586c3344f6f_l3.png "Rendered by QuickLaTeX.com")
ki ima rešitev  ,
,  in
in  . Torej se vektor izraža kot
. Torej se vektor izraža kot  .
.
3. Skalarni, vektorski in mešani produkt
1) Skalarni produkt vektorjev
Definicija 7.4: Skalarni produkt vektorjev  in
in  je število
je število  (beremo skalarno
(beremo skalarno  ).
).
Primer 7.4: Za vektorja  in
in  izračunajmo produkta.
izračunajmo produkta.  in
in  .
.
Lastnosti skalarnega produkta. Za poljubne vektorje , in , velja [1]:
 (simetričnost);
(simetričnost); , za vse (homogenost);
, za vse (homogenost); (aditivnost);
(aditivnost); in
in  natanko tedaj, ko je
natanko tedaj, ko je  (pozitivna definitnost).
(pozitivna definitnost).
Geometrijski pomen skalarnega produkta.
Norma vektorja je definirana s predpisom  .
.
Če je  kot med vektorjema in , potem je
kot med vektorjema in , potem je
![\[\cos\varphi=\displaystyle\frac{\vec{a}\cdot \vec{b}}{\norm{\vec{a}}\norm{\vec{b}}}.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-08a7e295bf2971d40b7dfb8bde5e47b8_l3.png "Rendered by QuickLaTeX.com")
Sledi, da sta vektorja in med seboj pravokotna natanko tedaj, ko je  Ničelni vektor je pravokoten na vsak drug vektor.
Ničelni vektor je pravokoten na vsak drug vektor.
Standardni bazni vektorji v so enotski in paroma pravokotni, tj.  in
in  .
.
Primer 7.5: Poiščimo kot med vektorjema  in
in  . Ali sta linearno odvisna? Ali sta pravokotna?
. Ali sta linearno odvisna? Ali sta pravokotna?
Izračunamo skalarni produkt vektorjev in :  . To pomeni, da vektorja in nista pravokotna. Če je kot med in , je
. To pomeni, da vektorja in nista pravokotna. Če je kot med in , je
![\[\cos\varphi=\displaystyle\frac{\vec{a}\cdot \vec{b}}{\norm{\vec{a}}\cdot\norm{\vec{b}}}=\frac{-10}{3\cdot 5}=-\frac{2}{3}.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-b5c96bb4793c98b4f8191133f0a6560b_l3.png "Rendered by QuickLaTeX.com")
Vektorja in sta linearno odvisna, če obstaja neki  tako, da je
tako, da je  oziroma
oziroma  Ker je sistem nerešljiv, sledi, da sta vektorja in linearno neodvisna.
Ker je sistem nerešljiv, sledi, da sta vektorja in linearno neodvisna.
2) Vektorski produkt vektorjev
Definicija 7.5: Vektorski produkt vektorjev in je vektor  (beremo vektorsko ), za katerega velja:
(beremo vektorsko ), za katerega velja:
- vektor je pravokoten na vektorja in ;
- ima dolžino
 , kjer je kot med vektorjema in ;
, kjer je kot med vektorjema in ; - če po krajši poti zavrtimo do , ima vektor smer desnega vijaka.
Lastnosti vektorskega produkta. Za poljubne vektorje , in , velja [1]:
 (antikomutativnost);
(antikomutativnost); in
in  (aditivnost);
(aditivnost); , za poljubno realno število (homogenost);
, za poljubno realno število (homogenost); ), za poljubni realni števili in
), za poljubni realni števili in  (linearnost);
(linearnost); natanko tedaj, ko sta vektorja in kolinearna, torej linearno odvisna; posebej velja
natanko tedaj, ko sta vektorja in kolinearna, torej linearno odvisna; posebej velja  in
in  ;
; ;
;  ;
;  ;
;- za vektorja in z razvojem determinante po prvi vrstici izračunamo
![\[\vec{a}\times \vec{b}=\begin{vmatrix} \bar{i}& \bar{j} & \bar{k}\\ a_1 & a_2 &a_3\\ b_1 & b_2 & b_3\end{vmatrix}=(a_2b_3-a_3b_2, a_1b_3-a_3b_1, a_1b_2-a_2b_1).\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-ac7b7631c55e935ff2e6ee1105ddb995_l3.png "Rendered by QuickLaTeX.com")
Geometrijski pomen vektorskega produkta.
Dolžina vektorskega produkta  je enaka ploščini paralelograma, ki ga določata vektorja in , kar je
je enaka ploščini paralelograma, ki ga določata vektorja in , kar je  , kjer je kot med vektorjema in .
, kjer je kot med vektorjema in .
Primer 7.6: Izračunajmo vektorski produkt vektorjev  in
in  .
.
Z razvojem determinante po prvi vrstici izračunamo
![\[\vec{a}\times \vec{b}=\begin{vmatrix} \bar{i}& \bar{j} & \bar{k}\\ 1 & 2 &3\\ -1 & 0 & 2\end{vmatrix}=(4, -5, 2).\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-5c717f4bf9214e7e387626fbf994fab2_l3.png "Rendered by QuickLaTeX.com")
Primer 7.7: Določimo ploščino trikotnika z oglišči v točkah  ,
,  in
in  .
.
Trikotnik  je napet na vektorja
je napet na vektorja  in
in  .
.
Ploščina trikotnika je enaka polovici ploščine paralelograma, napetega na vektorja in , torej je
 . Računamo
. Računamo  . Sledi, da je
. Sledi, da je  .
.
Primer 7.8: Vektorja in oklepata kot  . Izračunajte ploščino paralelograma, napetega na vektorja
. Izračunajte ploščino paralelograma, napetega na vektorja  in
in  , če je
, če je  in
in  .
.
Označimo s kot med vektorjema in , tj.  . Ploščina paralelograma, napetega na vektorja in , je enaka normi vektorskega produkta
. Ploščina paralelograma, napetega na vektorja in , je enaka normi vektorskega produkta  , ker je
, ker je  in
in  . To pomeni, da je ploščina iskanega paralelograma enaka
. To pomeni, da je ploščina iskanega paralelograma enaka
![\[p=\norm{7\vec{a}\times \vec{b}}=7\norm{\vec{a}}\norm{\vec{b}}\sin \varphi=7\cdot 2\cdot 3\cdot \dfrac{1}{2}=21.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-5c58dd55fe36fc18b1e3b860ca7a5a88_l3.png "Rendered by QuickLaTeX.com")
3) Mešani produkt vektorjev
Definicija 7.6: Mešani produkt vektorjev , in  je število
je število
![\[(\vec{a}, \vec{b}, \vec{c})=(\vec{a}\times \vec{b})\cdot \vec{c}=\begin{vmatrix}a_1&a_2&a_3\\ b_1&b_2&b_3\\ c_1&c_2&c_3\end{vmatrix}.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-756272effbe0e781b2a8bd431ff0a432_l3.png "Rendered by QuickLaTeX.com")
Geometrijski pomen mešanega produkta
Absolutna vrednost mešanega produkta  je enaka prostornini (ali volumnu) paralelepipeda, napetega na vektorje , in .
je enaka prostornini (ali volumnu) paralelepipeda, napetega na vektorje , in .
Sledi, da je  natanko tedaj, ko so vektorji , in komplanarni.
natanko tedaj, ko so vektorji , in komplanarni.
Primer 7.9: Določimo vrednost parametra tako, da bodo vektorji  ,
,  ter
ter  komplanarni.
komplanarni.
Vektorji  so komplanarni, ko je vrednost njihovega mešanega produkta enaka
so komplanarni, ko je vrednost njihovega mešanega produkta enaka  , torej ko je
, torej ko je
![\[\begin{vmatrix} -1&1&2\\ \lambda& 0& 1\\ 1&2&-1\end{vmatrix}=5\lambda+3=0.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-6df8c981a9a0255b786248e2098b5f82_l3.png "Rendered by QuickLaTeX.com")
Iz tega izhaja, da je 
4. Enačba ravnine v prostoru
Ravnina v trirazsežnem prostoru je določena na dva načina.
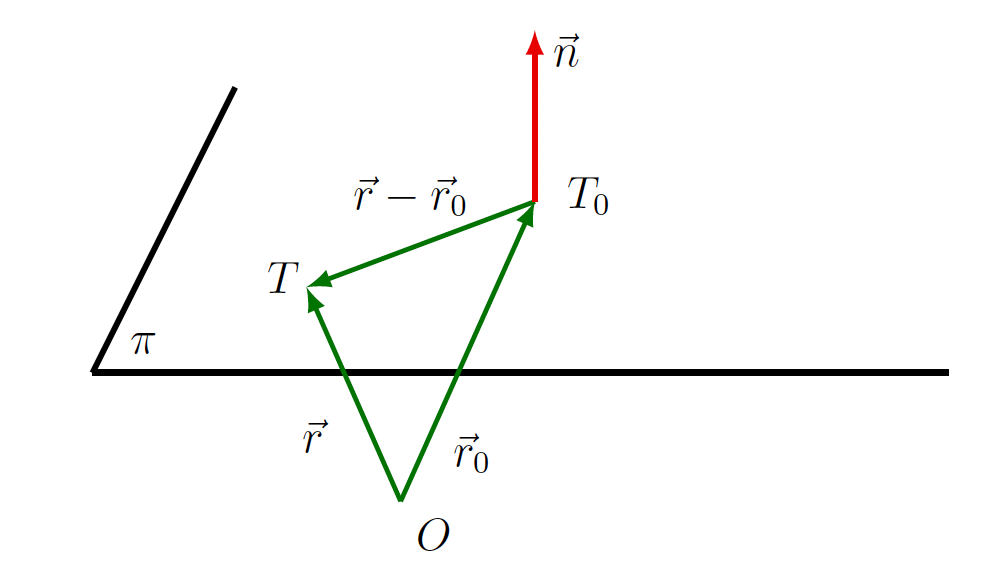
- S točko
 na ravnini in njeno pravokotnico (normalo) oziroma normalnim vektorjem
na ravnini in njeno pravokotnico (normalo) oziroma normalnim vektorjem  (glej sliko 7.3).
(glej sliko 7.3).
 s pravokotnico
s pravokotnico  .
.Poiskati enačbo ravnine v prostoru pomeni poiskati neko zvezo med danimi podatki (tj. točko  in normalnim vektorjem ) in koordinatami poljubne točke
in normalnim vektorjem ) in koordinatami poljubne točke  na ravnini. Ker leži vektor
na ravnini. Ker leži vektor  na ravnini , je pravokoten na normalni vektor , to pomeni, da velja
na ravnini , je pravokoten na normalni vektor , to pomeni, da velja
(1) 
kar je vektorska oblika enačbe ravnine.
V to enačbo vstavimo koordinate in dobimo splošno obliko enačbe ravnine:
![\[(a,b,c)\cdot (x-x_0, y-y_0, z-z_0)=0 \Longleftrightarrow a(x-x_0)+b(y-y_0)+c(z-z_0)=0\Longleftrightarrow\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-0d955b7f3e3c2d89a1a34415f9fcc702_l3.png "Rendered by QuickLaTeX.com")
![\[ax+by+cz=ax_0+by_0+cz_0\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-ccfff6b0216fa8f38abf68f1de857cc5_l3.png "Rendered by QuickLaTeX.com")
oziroma
(2) 
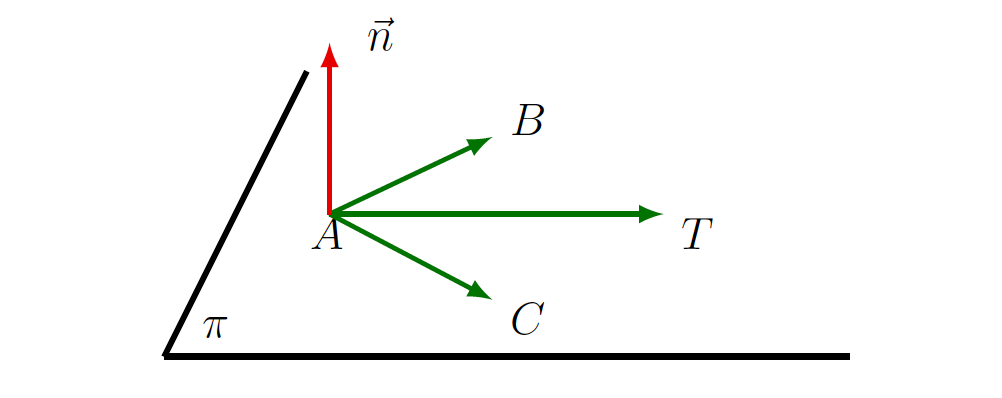
- S tremi točkami ,
 in
in  na ravnini, ki ne ležijo na isti premici (glej sliko 7.4).
na ravnini, ki ne ležijo na isti premici (glej sliko 7.4).
 s tremi točkami , in
s tremi točkami , in  .
.V tem primeru izračunamo normalni vektor ravnine kot vektorski produkt  . Poleg tega velja: če je poljubna točka na ravnini , potem so vektorji ,
. Poleg tega velja: če je poljubna točka na ravnini , potem so vektorji ,  in
in  komplanarni, torej je njihov mešani produkt
komplanarni, torej je njihov mešani produkt  :
:
(3) 
Vektorji , in so linearno odvisni, torej dobimo parametrično obliko enačbe ravnine
![\[\vv{AT}=t \vv{AB}+ s\vv{AC}, \ \ t,s\in\mathbb{R},\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-74ce2a980934b81c6954e663181022c2_l3.png "Rendered by QuickLaTeX.com")
oziroma
(4) 
Primer 7.10: Zapišimo enačbo ravnine, ki gre skozi točke  ,
,  in
in  .
.
Uporabimo enačbo (3) in dobimo
![\[\begin{vmatrix} x-4& y-3& z-0\\ 4-4& 0-3& -1-0\\ 0-4& 3-3& 2-0 \end{vmatrix}=0\Longleftrightarrow \begin{vmatrix} x-4& y-3& z\\ 0& -3& -1\\ -4& 0& 2 \end{vmatrix}=0.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-f15269d8fb5bd5e2e92065b755de7d34_l3.png "Rendered by QuickLaTeX.com")
Z razvojem determinanta po prvi vrstici dobimo enčbo iskane ravnine:
![\[-6(x-4)+4(y-3)-12z=0 \Longleftrightarrow 3x-2y+6z-6=0.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-1892e8a0ecd76f2ff517c952bd3a3357_l3.png "Rendered by QuickLaTeX.com")
5. Enačba premice v prostoru
Premica  v prostoru je določena različno.
v prostoru je določena različno.
- S točko na premici in smernim vektorjem
 (glej sliko 7.5).
(glej sliko 7.5).
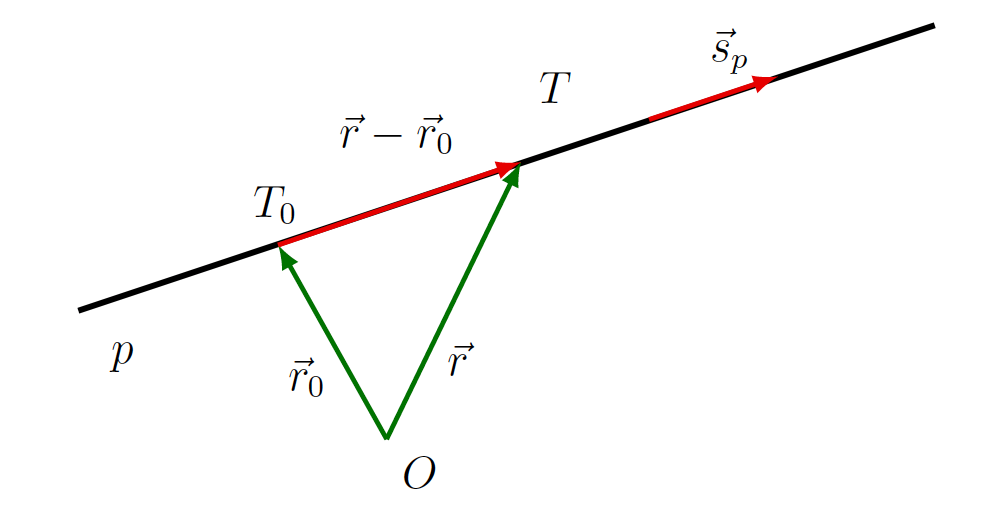 skozi točko s smernim vektorjem
skozi točko s smernim vektorjem  .
.Ker sta vektorja  in kolinearna (torej tudi linearno odvisna), lahko zapišemo relacijo
in kolinearna (torej tudi linearno odvisna), lahko zapišemo relacijo  , kjer je
, kjer je  poljubno realno število. Tako dobimo vektorsko obliko enačbe premice:
poljubno realno število. Tako dobimo vektorsko obliko enačbe premice:
(5) 
Če v to formulo vstavimo koordinate  ,
,  in , dobimo parametrično obliko enačbe premice:
in , dobimo parametrično obliko enačbe premice:
(6) 
Če izrazimo parameter , dobimo kanonično obliko enačbe premice:
(7) 
- Z dvema različnima točkama in . V tem primeru smerni vektor premice bo
 (glej sliko 7.6).
(glej sliko 7.6).
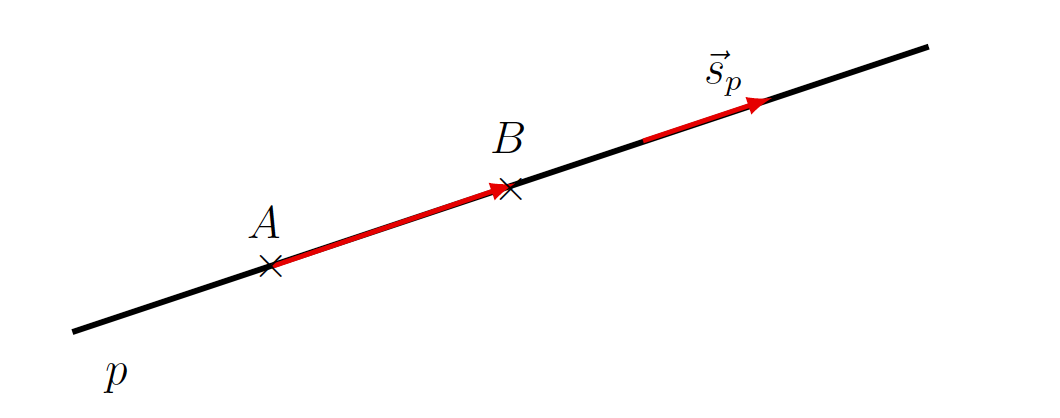 in .
in .- Z dvema nevzporednima ravninama
 in
in  oziroma kot presek ravnin:
oziroma kot presek ravnin:
(8)

6. Razdalja med točko in ravnino
Ravnina naj bo določena z normalnim vektorjem  in točko (ali s krajevnim vektorjem
in točko (ali s krajevnim vektorjem  ). Oddaljenost točke
). Oddaljenost točke  od ravnine
od ravnine 
 je najkrajša razdalja med dano točko in poljubno točko na ravnini (glej sliko 7.7).
je najkrajša razdalja med dano točko in poljubno točko na ravnini (glej sliko 7.7).
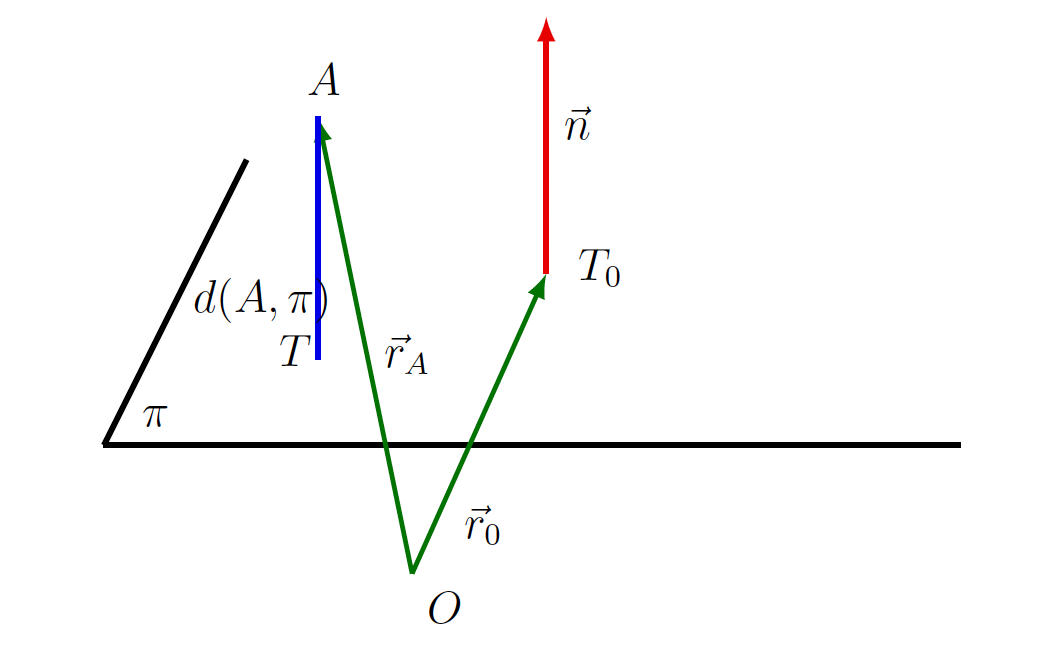
Razdalja je enaka dolžini projekcije vektorja  na normalni vektor ravnine , podane z enačbo
na normalni vektor ravnine , podane z enačbo  , torej je
, torej je
(9) 
Primer 7.11: Izračunajmo razdaljo med točko  in ravnino
in ravnino  .
.
Normalni vektor ravnine je  , koeficient
, koeficient  ter koordinate točke so
ter koordinate točke so  . Dobimo, da je razdalja med točko in ravnino enaka
. Dobimo, da je razdalja med točko in ravnino enaka
![\[d(A, \pi)=\displaystyle\frac{\lvert ax_A+by_A+cz_A-d\rvert}{\sqrt{a^2+b^2+c^2}}=\frac{\lvert 1\cdot 2-1\cdot 1+(-1)\cdot 1-4\rvert}{\sqrt{1^2+1^2+(-1)^2}}=\frac{4}{\sqrt{3}}.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-84e512d1dc65cb0f623f80aa6d6e086c_l3.png "Rendered by QuickLaTeX.com")
7. Razdalja med točko in premico
Premica naj bo določena s točko (ali s krajevnim vektorjem  ) in smernim vektorjem in naj bo poljubna točka (glej sliko 7.8).
) in smernim vektorjem in naj bo poljubna točka (glej sliko 7.8).
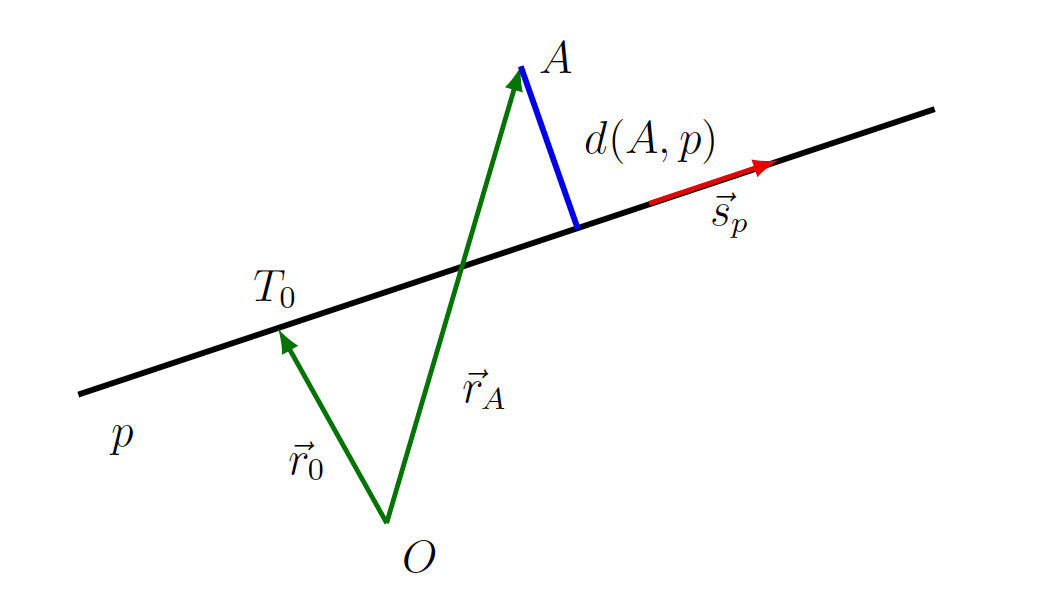 in premico .
in premico .Razdalja med točko in premico  je najmanjša razdalja med točko in neko točko na premici, torej je
je najmanjša razdalja med točko in neko točko na premici, torej je
(10) 
Primer 7.12: Izračunajmo razdaljo med točko in premico 
Če točka pripada premici, je razdalja med njima enaka . Torej, najprej preverimo, ali je dana točka na premici . V tem primeru ni tako, saj koordinate točke ne zadoščajo enačbi premice:  . Krajevni vektor točke je
. Krajevni vektor točke je  , smerni vektor premice je
, smerni vektor premice je  ter krajevni vektor točke na premici
ter krajevni vektor točke na premici  . Izračunamo vektorski produkt
. Izračunamo vektorski produkt
![\[(\vec{r}_A-\vec{r}_0)\times \vec{s}_p=(-1,1,0)\times (1,2,3)=\begin{vmatrix} \bar{i}&\bar{j}&\bar{k}\\-1&1&0\\ 1&2&3\end{vmatrix}=(3,3,-3).\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-de70535b8d942e00929c4b2c9bec35ed_l3.png "Rendered by QuickLaTeX.com")
Po formuli (10) sledi, da je razdalja med točko in premico enaka
![\[d(A, p)=\displaystyle\frac{\norm{(3,3,-3)}}{\norm{(1,2,3)}}=\frac{\sqrt{27}}{\sqrt{14}}.\]](https://books.ung.si/app/uploads/quicklatex/quicklatex.com-7f05617b8350c1ce93db54e006bbf0c6_l3.png "Rendered by QuickLaTeX.com")
